





















Nomadic secures $8.4 million to manage data from autonomous vehicles
Nomadic raises $8.4M to handle massive data generated by autonomous vehicles, improving data processing, storage, and real-time insights.

Startup NomadicML has secured $8.4 million in seed funding to address a growing challenge in the development of autonomous systems: managing and extracting value from massive volumes of collected data.
As companies build self-driving vehicles, robotic systems, and autonomous machinery, they accumulate vast amounts of video footage for testing, validation, and training. In many cases, this data reaches thousands or even millions of hours. However, organising and analysing such footage often requires human review, which is inefficient and difficult to scale, even with tools like fast-forwarding.
NomadicML, founded by CEO Mustafa Bal and CTO Varun Krishnan, is focused on solving this bottleneck. The company aims to help organisations that currently have up to 95% of their fleet-generated data sitting unused in archives.
The challenge becomes even more complex when dealing with edge cases — rare but critical scenarios essential to improving the performance of physical AI systems. These events, though infrequent, are often the most valuable for training models, as they test how systems behave in unusual or unexpected conditions.
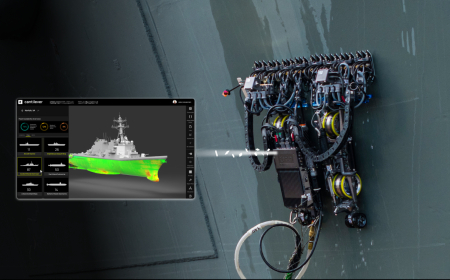
To address this, NomadicML has developed a platform that converts raw video footage into structured and searchable datasets using a combination of vision-language models. This allows companies to monitor their fleets more effectively, generate tailored datasets for reinforcement learning, and accelerate development cycles.
The company announced its $8.4 million seed funding round on Tuesday, reaching a post-money valuation of $50 million. The round was led by TQ Ventures, with participation from Pear VC and Jeff Dean. The funding will be used to expand its customer base and continue improving its technology platform. NomadicML also won first place at the pitch competition held during Nvidia GTC last month.
Both founders met while studying computer science at Harvard and later encountered similar technical challenges during their work at companies such as Lyft and Snowflake. Reflecting on those experiences, Bal explained that the company’s goal is to provide meaningful insights from data generated by autonomous vehicles and robots, rather than relying on generic datasets.
For example, training an autonomous vehicle to recognise when it can proceed through a red light when directed by a police officer requires identifying very specific scenarios in large datasets. Similarly, isolating instances where vehicles pass under a particular type of bridge can be important for both compliance and training. NomadicML’s platform enables users to locate such events efficiently and integrate them directly into machine learning pipelines.
The platform is already being used by companies including Zoox, Mitsubishi Electric, Natix Network, and Zendar to advance the development of intelligent systems. According to Antonio Puglielli, the tool has allowed teams to scale their work more efficiently than outsourcing, while also benefiting from NomadicML’s specialised expertise.
This type of automated, model-driven annotation approach is becoming an important workflow in physical AI development. Established data labelling firms such as Scale AI, Kognic, and Encord are also building AI-powered tools for similar purposes. Meanwhile, Nvidia has released open-source models like Alpamayo to help tackle these challenges.
Krishnan describes NomadicML’s platform as more than a labelling tool, calling it an “agentic reasoning system” that can interpret instructions and determine how to locate relevant data by combining multiple models to understand actions and context within footage. Investors believe that the company’s focus on this specialised infrastructure could give it a competitive advantage.
Schuster Tanger, who led the funding round, compared the approach to the way companies rely on external infrastructure providers rather than building everything in-house. He noted that if autonomous vehicle companies attempt to develop such systems themselves, it could distract them from their core focus of building better robots.
Tanger also highlighted the team’s technical strength, mentioning that Krishnan is an international chess master ranked among the world’s top players. Krishnan, in turn, pointed out that many of the company’s engineers have published scientific research papers.
Looking ahead, the team is developing additional tools, including systems that can analyse the physics of lane changes using video data and others that can determine precise positioning for robotic grippers. A key future objective is to extend these capabilities beyond visual data to include other sensor inputs, such as lidar, and to integrate information across multiple sensing modalities.
Bal emphasised the complexity of the challenge, noting that managing terabytes of video data, processing it with large-scale AI models, and extracting accurate insights is extremely demanding and requires sophisticated infrastructure and algorithms.
What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Angry
0
Angry
0
 Sad
0
Sad
0
 Wow
0
Wow
0